




首页 产品中心

-
TYSC320防爆电动缸
型号:TYSC320 电机安装方式;直连式 丝杆直径:125mm 丝杆导程:32mm 有效行程:2000mm 额定负载:80T 电机功率:22KW 最高速度:800mm/s 重复定位精度:±0.01mm 防护等级:IP65
查看详情

-
伺服液压机
伺服压力机通常指采用伺服电机进行驱动控制的压力机。包括金属锻压用伺服压力机及耐火材料等行业专用伺服压力机。因伺服电机的数控化特点,有时也广泛称其为数控压力机。
查看详情

-
桌面式伺服压装机
伺服压力机通常指采用伺服电机进行驱动控制的压力机。包括金属锻压用伺服压力机及耐火材料等行业专用伺服压力机。因伺服电机的数控化特点,有时也广泛称其为数控压力机。
查看详情

-
C型伺服压装机
伺服压力机通常指采用伺服电机进行驱动控制的压力机。包括金属锻压用伺服压力机及耐火材料等行业专用伺服压力机。因伺服电机的数控化特点,有时也广泛称其为数控压力机。
查看详情

-
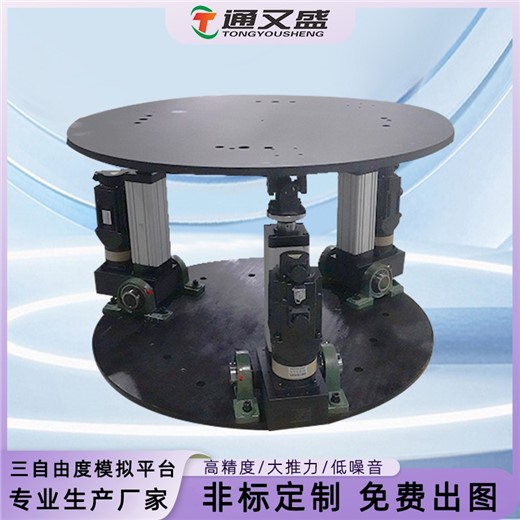
三自由度平台
六自由度运动平台是由六支电缸,上、下各六只万向铰链和上、下两个平台组成,下平台固定在基础上,借助六支电缸的伸缩运动,完成上平台在空间六个自由度(X,Y,Z,α,β,γ)的运动,从而可以模拟出各种空间运动姿态。
查看详情

-
六自由度模拟平台
六自由度运动平台是由六支电缸,上、下各六只万向铰链和上、下两个平台组成,下平台固定在基础上,借助六支电缸的伸缩运动,完成上平台在空间六个自由度(X,Y,Z,α,β,γ)的运动,从而可以模拟出各种空间运动姿态。
查看详情

-
六自由度模拟平台
六自由度运动平台是由六支电缸,上、下各六只万向铰链和上、下两个平台组成,下平台固定在基础上,借助六支电缸的伸缩运动,完成上平台在空间六个自由度(X,Y,Z,α,β,γ)的运动,从而可以模拟出各种空间运动姿态。
查看详情
-
圆形三自由度平台
六自由度运动平台是由六支电缸,上、下各六只万向铰链和上、下两个平台组成,下平台固定在基础上,借助六支电缸的伸缩运动,完成上平台在空间六个自由度(X,Y,Z,α,β,γ)的运动,从而可以模拟出各种空间运动姿态。
查看详情